New chip could help tiny robots traverse complex environments
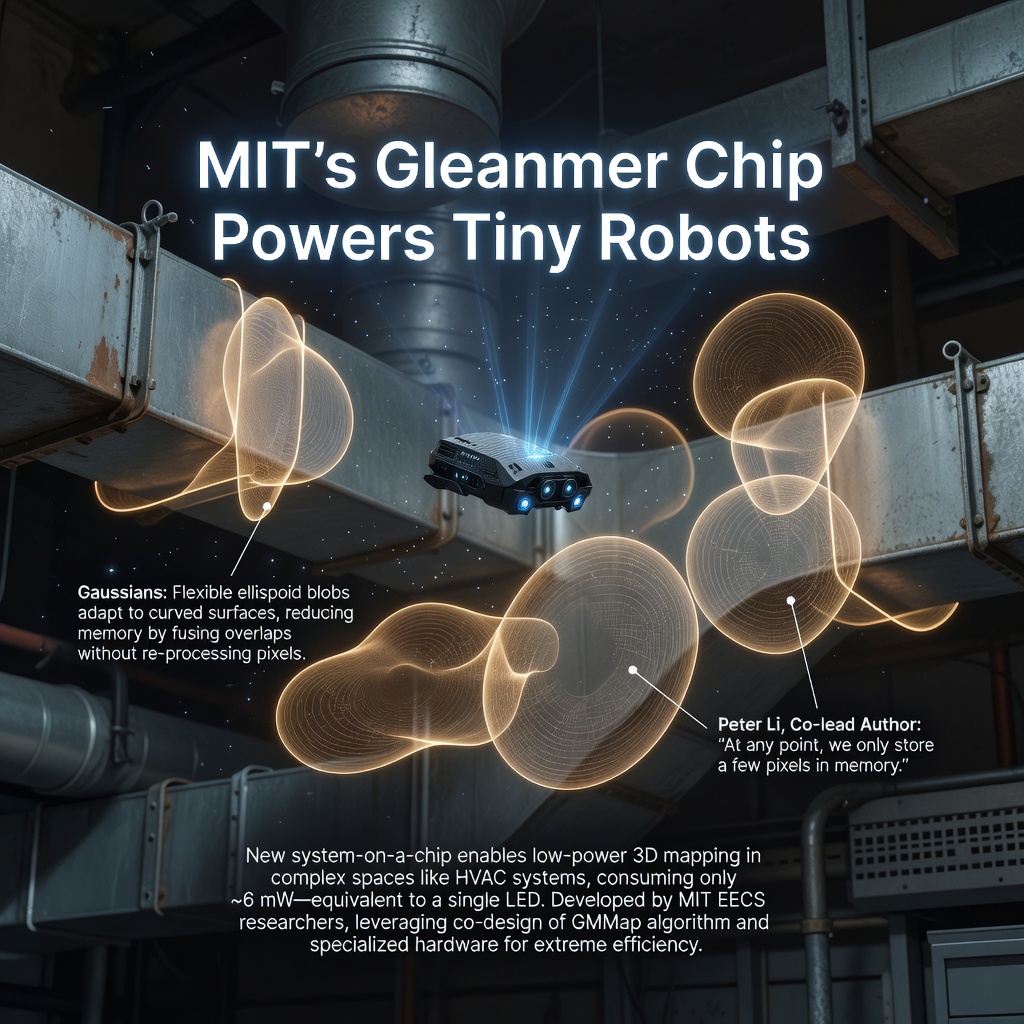
A new chip developed by MIT researchers could enable tiny, low-power drones to navigate complex spaces like industrial HVAC systems to detect gas leaks. The system-on-a-chip, named Gleanmer, allows small autonomous robots to build detailed 3D maps of their surroundings in real time while consuming only about 6 milliwatts of power—roughly the same as a single LED. This breakthrough could also extend to lightweight augmented reality headsets for medical training or repair work.
Traditional mapping methods require power-hungry systems and large memory to store and process 3D representations. The MIT team overcame this by combining an efficient mapping algorithm with specialized hardware, minimizing both memory and power use. “This paper showcases a key example of how you can leverage co-design of the algorithm and hardware to really push energy efficiency,” says Vivienne Sze, a professor in EECS and a senior author of the paper, which was presented at the IEEE Very Large-Scale Integrated Circuits Symposium.
Efficient Mapping with Gaussians
Instead of using cube-shaped voxels (3D pixels), the researchers adopted a technique that represents obstacles with flexible ellipsoid blobs called Gaussians. These adapt to curved surfaces more compactly than rigid voxels, capturing both obstacles and free space with far less memory. The team’s algorithm, GMMap, generates accurate Gaussians from depth images in a single pass, discarding the images immediately. By comparing only neighboring pixels rather than all pixels, the chip never needs to store an entire image at once. “At any point in time, we only need to store a few pixels in memory,” explains co-lead author Peter Li.
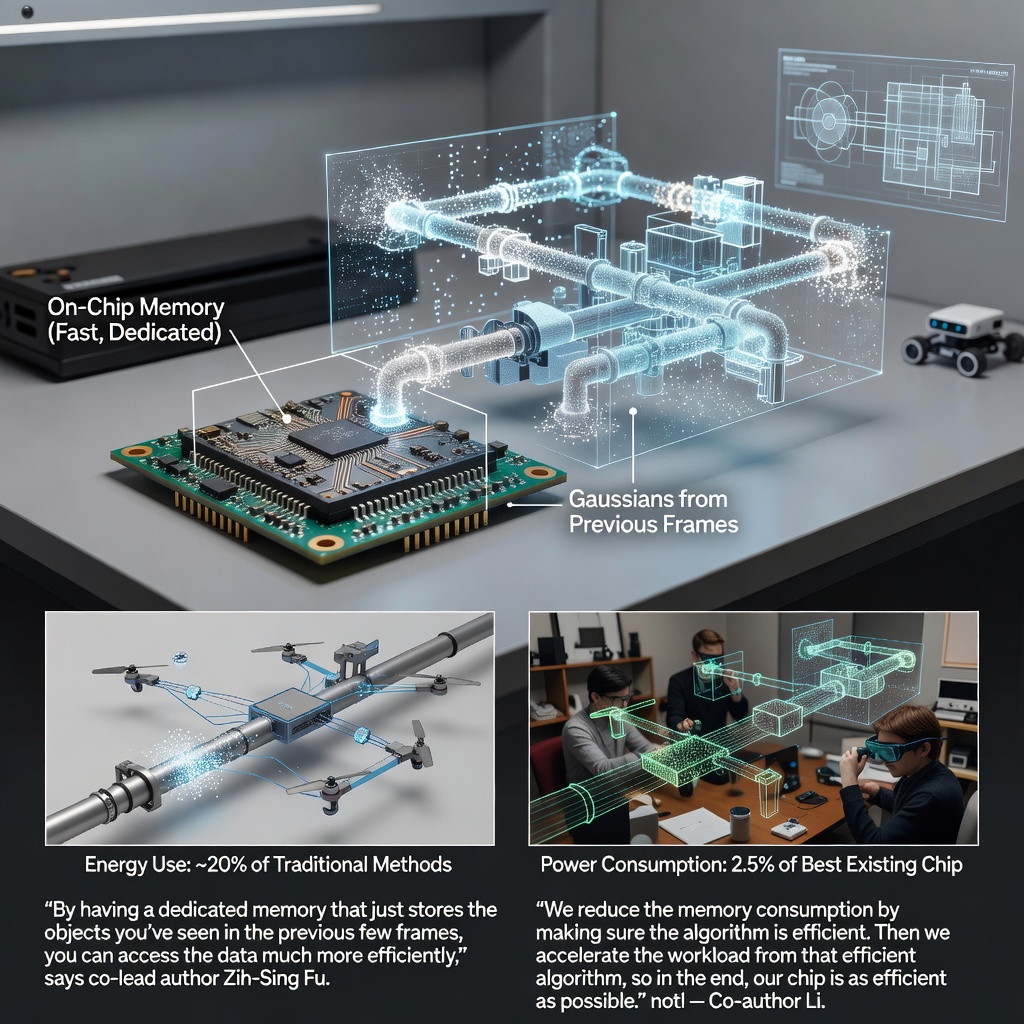
As the robot moves, it may see the same object from different angles, creating overlapping Gaussians. The researchers developed a method to fuse overlapping Gaussians directly without re-processing original pixels, further reducing memory and power demands. Most computations operate on the compact Gaussians, enabling the chip to keep active data in small, fast on-chip memory rather than fetching from distant, power-hungry off-chip storage. “By having a dedicated memory that just stores the objects you’ve seen in the previous few frames, you can access the data much more efficiently,” says co-lead author Zih-Sing Fu.
Hardware-Algorithm Co-Design
The Gleanmer chip leverages co-design to achieve extreme efficiency. It consumes only about 2.5 percent of the power required by the best existing chip for map construction. When planning collision-free paths, the chip reuses compact Gaussians along the route, using roughly 20 percent of the energy that traditional methods would need. “We reduce the memory consumption by making sure the algorithm is efficient. Then we accelerate the workload from that efficient algorithm, so in the end, our chip is as efficient as possible,” adds Li.
Real-World Testing and Future Applications
The researchers tested Gleanmer on diverse 3D environments and live data from an iPhone camera, generating detailed maps in real time. “Real-time 3D mapping has been the missing piece for small autonomous systems,” says co-author Sertac Karaman, a professor of aeronautics and astronautics. “A drone inspecting a pipeline or a pair of AR glasses navigating a room both need to understand the space around them — instantly, continuously, and at almost no power cost."
Future work aims to move processing units closer to sensors for even greater efficiency. The team also sees potential for using Gaussians to represent schematics, helping AI systems reason about complex blueprints more effectively. The research was supported in part by the MIT-MathWorks Fellowship, Amazon, the U.S. National Science Foundation, and Intel.
The source for this article is https://news.mit.edu/2026/new-chip-could-help-tiny-robots-traverse-complex-environments-0623.